

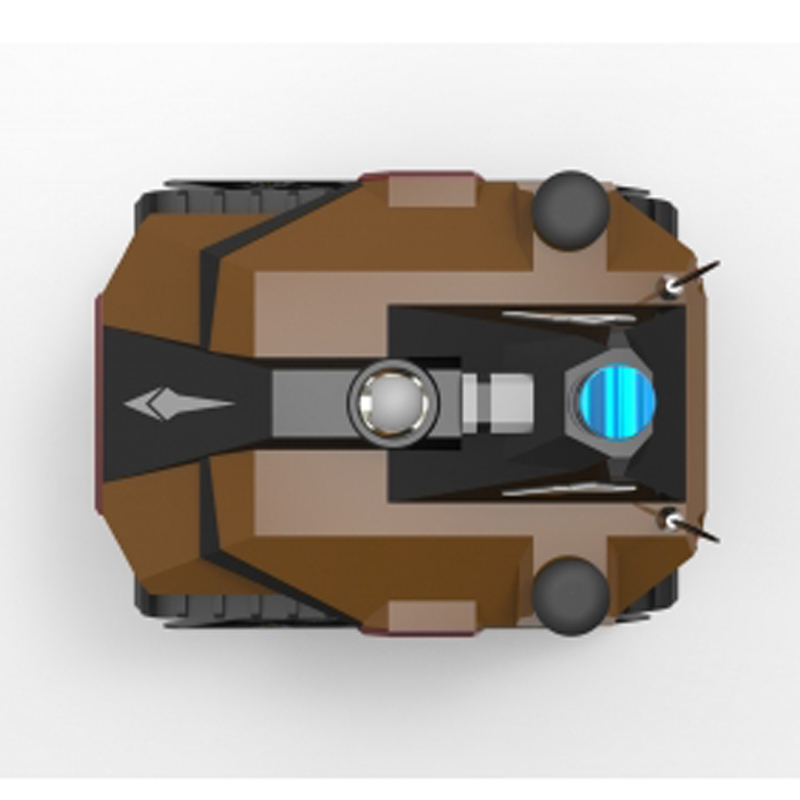
智能巡检机器人DA-M100-A
针对原油库、化工厂、炼化厂、联合站等石化能源行业的应用场景,联合开发和推广能够支持常态化的巡检,具备自主导航、定位、避障和巡检作业能力的智能化巡检AGV。
功能特性
整车采用克里斯蒂全独立悬挂设计,内部搭载高扭矩无刷电机,底盘高度和功率合理匹配,使得该车型通过性强、重心较低、运行平稳且传动效率高,适用于特种行业的设备移动方案,适合搭载摄影器材和具有平稳性要求的移动机器人。该无人巡逻车可完成固定路线的寻迹、避障、路径规划以及特定检测任务的执行。紧急情况下可由后台调度与遥控(如定位信号长时间丢失及其他紧急情况)。所搭载任务平台根据需要,可安装红外成像、智能摄像头、气体传感器、高音喇叭等相关设备,完成监测、预警、安防等工作。

应用场景
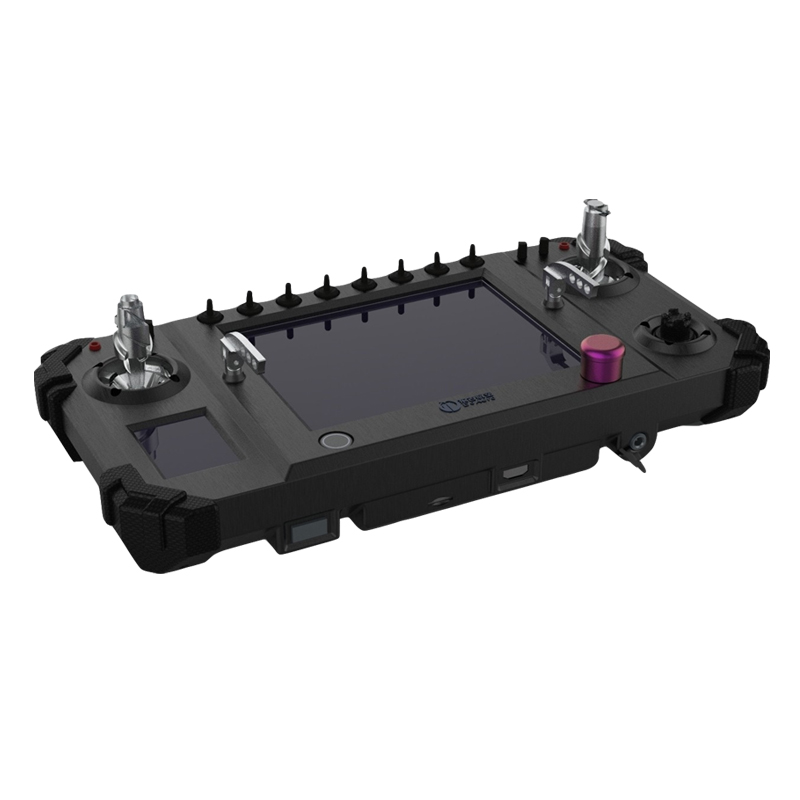
基于无人机飞行控制系统开发高性价比的地面机器人控制系统,具备较强的扩展性和兼容性,能够提供适应电动、液压、轮式、履带式等不同形式的地面机器人控制,且该系统能够与空中无人机系统进行无缝整合,将地面机器人系统的运行状态、坐标信息整合到东古航空空地一体化监控平台中,是实现空地一体、联防联控的重要落地设施。未来该系统将能够实现地面机器人系统和空中无人机系统的硬件级控制权切换,并支持车载智能导航系统的系统整合。

行走部分
外形尺寸:1000*700*780
底盘自重:70kg
离地高度:85mm
行走速度:0-5km/h
履带材质:橡胶(内嵌凯夫拉)
越障高度:200mm
爬坡能力:30°斜坡或楼梯
导航系统:自主导航/避障
转向半径:原地旋转
最大载重:--
最大跨度:300mm
续航时间:4h
主体材质:304不锈钢/合金钢板/铝/高分子材料
通讯距离:>5km(地面低频段,工业用遥控、图传)
涉水深度:180mm
防护等级:IP64
减震形式:克里斯蒂式独立悬挂、玛蒂尔达四轮组
多传感器融合:激光雷达、毫米波雷达、超声波雷达、惯导




 352847080
352847080